Depth estimation
Depth estimation with event cameras is possible by applying the same approach of disparity calculation on a calibrated stereo camera rig. The straightforward approach is to accumulate frames from events on both cameras and use the same disparity estimation algorithm. This approach might have some limitations, since accumulating events might result in suboptimal results due to low texture available in an accumulated frame.
The dv-processing library provides the dv::camera::StereoGeometry and a few disparity estimation algorithms
that, in combination, can be used to build a depth estimation pipeline.
Semi-dense stereo block matching
Dense block matching here refers to the most straightforward approach: accumulating full frames and running a
conventional disparity estimation on top to estimate depth. Since the accumulated frames only contain limited texture
due to pixels reacting to brightness changes - this approach is referred to as semi-dense. The
SemiDenseStereoMatcher class wraps the disparity estimation part, where estimated disparity can be used to
calculate depth with dv::camera::StereoGeometry.
Following sample code show the use of SemiDenseStereoMatcher with dv::camera::StereoGeometry
to run a real-time depth estimation pipeline on a calibration stereo camera.
1#include <dv-processing/camera/calibration_set.hpp>
2#include <dv-processing/core/stereo_event_stream_slicer.hpp>
3#include <dv-processing/depth/semi_dense_stereo_matcher.hpp>
4#include <dv-processing/io/stereo_capture.hpp>
5#include <dv-processing/noise/background_activity_noise_filter.hpp>
6
7#include <opencv2/highgui.hpp>
8
9int main() {
10 using namespace std::chrono_literals;
11
12 // Path to a stereo calibration file, replace with a file path on your local file system
13 const std::string calibrationFilePath = "path/to/calibration.json";
14
15 // Load the calibration file
16 auto calibration = dv::camera::CalibrationSet::LoadFromFile(calibrationFilePath);
17
18 // It is expected that calibration file will have "C0" as the leftEventBuffer camera
19 auto leftCamera = calibration.getCameraCalibration("C0").value();
20
21 // The second camera is assumed to be rightEventBuffer-side camera
22 auto rightCamera = calibration.getCameraCalibration("C1").value();
23
24 // Open the stereo camera with camera names from calibration
25 dv::io::StereoCapture capture(leftCamera.name, rightCamera.name);
26
27 // Make sure both cameras support event stream output, throw an error otherwise
28 if (!capture.left.isEventStreamAvailable() || !capture.right.isEventStreamAvailable()) {
29 throw dv::exceptions::RuntimeError("Input camera does not provide an event stream.");
30 }
31
32 // Initialize a stereo block matcher with a stereo geometry from calibration and the preconfigured SGBM instance
33 dv::SemiDenseStereoMatcher blockMatcher(std::make_unique<dv::camera::StereoGeometry>(leftCamera, rightCamera));
34
35 // Initialization of a stereo event sliver
36 dv::StereoEventStreamSlicer slicer;
37
38 // Initialize a window to show previews of the output
39 cv::namedWindow("Preview", cv::WINDOW_NORMAL);
40
41 // Local event buffers to implement overlapping window of events for accumulation
42 dv::EventStore leftEventBuffer, rightEventBuffer;
43
44 // Use one third of the resolution as count of events per accumulated frame
45 const size_t eventCount = static_cast<size_t>(leftCamera.resolution.area()) / 3;
46
47 // Register a callback to be done at 30Hz
48 slicer.doEveryTimeInterval(33ms, [&blockMatcher, &leftEventBuffer, &rightEventBuffer, eventCount](
49 const auto &leftEvents, const auto &rightEvents) {
50 // Push input events into the local buffers
51 leftEventBuffer.add(leftEvents);
52 rightEventBuffer.add(rightEvents);
53
54 // If the number of events is above the count, just keep the latest events
55 if (leftEventBuffer.size() > eventCount) {
56 leftEventBuffer = leftEventBuffer.sliceBack(eventCount);
57 }
58 if (rightEventBuffer.size() > eventCount) {
59 rightEventBuffer = rightEventBuffer.sliceBack(eventCount);
60 }
61
62 // Pass these events into block matcher and estimate disparity, the matcher will accumulate frames
63 // internally. The disparity output is 16-bit integer, that has sub-pixel precision.
64 const auto disparity = blockMatcher.computeDisparity(leftEventBuffer, rightEventBuffer);
65
66 // Convert disparity into 8-bit integers with scaling and normalize the output for a nice preview.
67 // This loses the actual numeric value of the disparity, but it's a nice way to visualize the disparity.
68 cv::Mat disparityU8, disparityColored;
69 disparity.convertTo(disparityU8, CV_8UC1, 1.0 / 16.0);
70 cv::normalize(disparityU8, disparityU8, 0, 255, cv::NORM_MINMAX);
71
72 // Convert the accumulated frames into colored images for preview.
73 std::vector<cv::Mat> images(3);
74 cv::cvtColor(blockMatcher.getLeftFrame().image, images[0], cv::COLOR_GRAY2BGR);
75 cv::cvtColor(blockMatcher.getRightFrame().image, images[1], cv::COLOR_GRAY2BGR);
76
77 // Apply color-mapping to the disparity image, this will encode depth with color: red - close; blue - far.
78 cv::applyColorMap(disparityU8, images[2], cv::COLORMAP_JET);
79
80 // Concatenate images and show them in a window
81 cv::Mat preview;
82 cv::hconcat(images, preview);
83 cv::imshow("Preview", preview);
84 });
85
86 // Buffer input events in these variables to synchronize inputs
87 std::optional<dv::EventStore> leftEvents = std::nullopt;
88 std::optional<dv::EventStore> rightEvents = std::nullopt;
89
90 // Run the processing loop while both cameras are connected
91 while (capture.left.isRunning() && capture.right.isRunning()) {
92 // Read events from respective left / right cameras
93 if (!leftEvents.has_value()) {
94 leftEvents = capture.left.getNextEventBatch();
95 }
96 if (!rightEvents.has_value()) {
97 rightEvents = capture.right.getNextEventBatch();
98 }
99
100 // Feed the data into the slicer and reset the buffer
101 if (leftEvents && rightEvents) {
102 slicer.accept(*leftEvents, *rightEvents);
103 leftEvents = std::nullopt;
104 rightEvents = std::nullopt;
105 }
106
107 // Wait for a small amount of time to avoid CPU overhaul
108 cv::waitKey(1);
109 }
110
111 return 0;
112}
1import dv_processing as dv
2import cv2 as cv
3from datetime import timedelta
4
5# Path to a stereo calibration file, replace with a file path on your local file system
6calibration_file_path = "path/to/calibration.json"
7
8# Load the calibration file
9calibration = dv.camera.CalibrationSet.LoadFromFile(calibration_file_path)
10
11# It is expected that calibration file will have "C0" as the leftEventBuffer camera
12left_camera = calibration.getCameraCalibration("C0")
13
14# The second camera is assumed to be rightEventBuffer-side camera
15right_camera = calibration.getCameraCalibration("C1")
16
17# Open the stereo camera with camera names from calibration
18capture = dv.io.StereoCapture(left_camera.name, right_camera.name)
19
20# Make sure both cameras support event stream output, throw an error otherwise
21if not capture.left.isEventStreamAvailable() or not capture.right.isEventStreamAvailable():
22 raise RuntimeError("Input camera does not provide an event stream.")
23
24# Initialize a stereo block matcher with a stereo geometry from calibration and the preconfigured SGBM instance
25block_matcher = dv.SemiDenseStereoMatcher(dv.camera.StereoGeometry(left_camera, right_camera))
26
27# Initialization of a stereo event sliver
28slicer = dv.StereoEventStreamSlicer()
29
30# Initialize a window to show previews of the output
31cv.namedWindow("Preview", cv.WINDOW_NORMAL)
32
33# Local event buffers to implement overlapping window of events for accumulation
34global left_event_buffer, right_event_buffer
35left_event_buffer = dv.EventStore()
36right_event_buffer = dv.EventStore()
37
38# Use one third of the resolution as count of events per accumulated frame
39event_count = int((left_camera.resolution[0] * left_camera.resolution[1]) / 3)
40
41
42# Stereo slicer callback method
43def callback(left_events: dv.EventStore, right_events: dv.EventStore):
44 # Push input events into the local buffers
45 global left_event_buffer, right_event_buffer
46 left_event_buffer.add(left_events)
47 right_event_buffer.add(right_events)
48
49 # If the number of events is above the count, just keep the latest events
50 if len(left_event_buffer) > event_count:
51 left_event_buffer = left_event_buffer.sliceBack(event_count)
52 if len(right_event_buffer) > event_count:
53 right_event_buffer = right_event_buffer.sliceBack(event_count)
54
55 # Pass these events into block matcher and estimate disparity, the matcher will accumulate frames
56 # internally. The disparity output is 16-bit integer, that has sub-pixel precision.
57 disparity = block_matcher.computeDisparity(left_event_buffer, right_event_buffer)
58
59 # Convert the accumulated frames into colored images for preview.
60 images = []
61 images.append(cv.cvtColor(block_matcher.getLeftFrame().image, cv.COLOR_GRAY2BGR))
62 images.append(cv.cvtColor(block_matcher.getRightFrame().image, cv.COLOR_GRAY2BGR))
63
64 # Convert disparity into 8-bit integers with scaling and normalize the output for a nice preview.
65 # This loses the actual numeric value of the disparity, but it's a nice way to visualize the disparity.
66 # Apply color-mapping to the disparity image, this will encode depth with color: red - close; blue - far.
67 images.append(cv.applyColorMap(cv.normalize(disparity, None, 0, 255, cv.NORM_MINMAX, cv.CV_8UC1), cv.COLORMAP_JET))
68
69 # Concatenate images and show them in a window
70 cv.imshow("Preview", cv.hconcat(images))
71
72
73# Register a callback to be done at 30Hz
74slicer.doEveryTimeInterval(timedelta(milliseconds=33), callback)
75
76# Buffer input events in these variables to synchronize inputs
77left_events = None
78right_events = None
79
80# Run the processing loop while both cameras are connected
81while capture.left.isRunning() and capture.right.isRunning():
82 # Read events from respective left / right cameras
83 if left_events is None:
84 left_events = capture.left.getNextEventBatch()
85 if right_events is None:
86 right_events = capture.right.getNextEventBatch()
87
88 # Feed the data into the slicer and reset the buffer
89 if left_events is not None and right_events is not None:
90 slicer.accept(left_events, right_events)
91 left_events = None
92 right_events = None
93
94 # Wait for a small amount of time to avoid CPU overhaul
95 cv.waitKey(1)
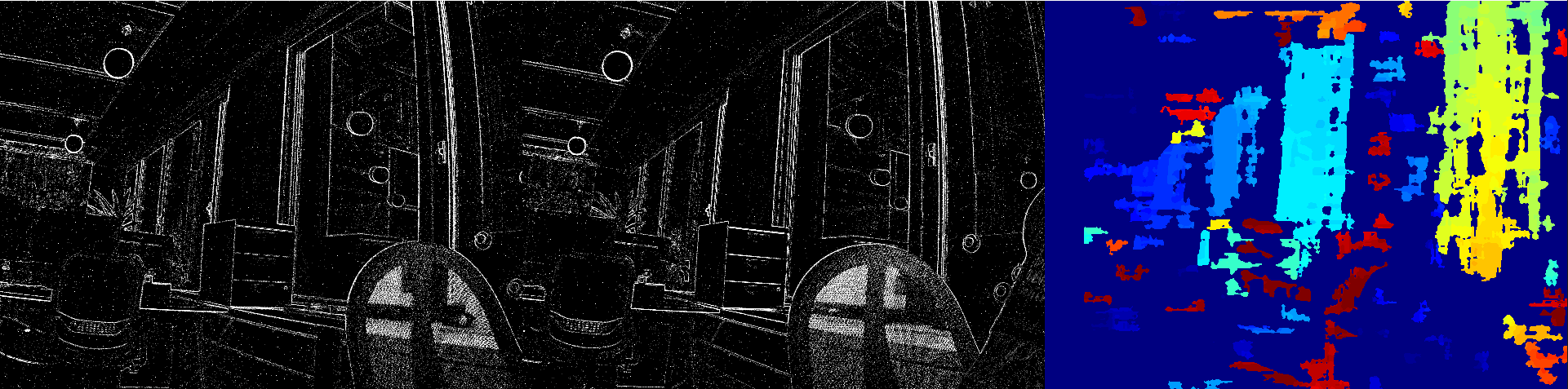
Expected result of semi-dense disparity estimation. The output provides two accumulated frames and color-coded disparity map.
Note
Disparity map yields results only in areas with visible texture, areas without texture contain speckle noise.
Sparse disparity estimation
The semi-dense appraoch is a straightforward to stereo disparity estimation. Another approach is to perform disparity estimation on sparse selected regions within accumulated image. Sparse estimation approach allows the implementation to select regions with enough texture to be selected for the disparity, reducing computational complexity and improving quality. The sparse approach takes point coordinates of where the disparity needs to be estimated, performs sparse accumulation only in the regions where disparity matching actually needs to happen and runs correlation based template matching of left image patches on the right camera image. Each template is matched against the other image on a horizontal line using normalized correlation coefficient (Pearson correlation) and the best scoring match is considered to be the correct match and according disparity is assigned to that point.
The following sample code shows the use of sparse disparity block matcher with a live calibrated stereo camera:
1#include <dv-processing/camera/calibration_set.hpp>
2#include <dv-processing/cluster/mean_shift/event_store_adaptor.hpp>
3#include <dv-processing/core/stereo_event_stream_slicer.hpp>
4#include <dv-processing/data/utilities.hpp>
5#include <dv-processing/depth/sparse_event_block_matcher.hpp>
6#include <dv-processing/io/stereo_capture.hpp>
7#include <dv-processing/visualization/colors.hpp>
8
9#include <opencv2/highgui.hpp>
10
11int main() {
12 using namespace std::chrono_literals;
13
14 // Path to a stereo calibration file, replace with a file path on your local file system
15 const std::string calibrationFilePath = "path/to/calibration.json";
16
17 // Load the calibration file
18 auto calibration = dv::camera::CalibrationSet::LoadFromFile(calibrationFilePath);
19
20 // It is expected that calibration file will have "C0" as the leftEventBuffer camera
21 auto leftCamera = calibration.getCameraCalibration("C0").value();
22
23 // The second camera is assumed to be rightEventBuffer-side camera
24 auto rightCamera = calibration.getCameraCalibration("C1").value();
25
26 // Open the stereo camera with camera names from calibration
27 dv::io::StereoCapture capture(leftCamera.name, rightCamera.name);
28
29 // Make sure both cameras support event stream output, throw an error otherwise
30 if (!capture.left.isEventStreamAvailable() || !capture.right.isEventStreamAvailable()) {
31 throw dv::exceptions::RuntimeError("Input camera does not provide an event stream.");
32 }
33
34 // Matching window size for the block matcher
35 const cv::Size window(24, 24);
36 // Minimum disparity value to measure
37 const int minDisparity = 0;
38 // Maximum disparity value
39 const int maxDisparity = 40;
40 // Minimum z-score value that a valid match can have
41 const float minScore = 0.0f;
42
43 // Initialize the block matcher with rectification
44 auto matcher = dv::SparseEventBlockMatcher(std::make_unique<dv::camera::StereoGeometry>(leftCamera, rightCamera),
45 window, maxDisparity, minDisparity, minScore);
46
47 // Initialization of a stereo event sliver
48 dv::StereoEventStreamSlicer slicer;
49
50 // Initialize a window to show previews of the output
51 cv::namedWindow("Preview", cv::WINDOW_NORMAL);
52
53 // Local event buffers to implement overlapping window of events for accumulation
54 dv::EventStore leftEventBuffer, rightEventBuffer;
55
56 // Use one third of the resolution as count of events per accumulated frame
57 const size_t eventCount = static_cast<size_t>(leftCamera.resolution.area()) / 3;
58
59 // Register a callback to be done at 50Hz
60 slicer.doEveryTimeInterval(20ms, [&matcher, &leftEventBuffer, &rightEventBuffer, eventCount, &window](
61 const auto &leftEvents, const auto &rightEvents) {
62 // Push input events into the local buffers
63 leftEventBuffer.add(leftEvents);
64 rightEventBuffer.add(rightEvents);
65
66 // If the number of events is above the count, just keep the latest events
67 if (leftEventBuffer.size() > eventCount) {
68 leftEventBuffer = leftEventBuffer.sliceBack(eventCount);
69 }
70 if (rightEventBuffer.size() > eventCount) {
71 rightEventBuffer = rightEventBuffer.sliceBack(eventCount);
72 }
73
74 // Number of clusters to extract
75 constexpr int numClusters = 100;
76
77 // Initialize the mean-shift clustering algorithm
78 dv::cluster::mean_shift::MeanShiftEventStoreAdaptor meanShift(leftEventBuffer, 10.f, 1.0f, 20, numClusters);
79
80 // Find cluster centers which are going to be used for disparity estimation
81 auto centers = meanShift.findClusterCentres<dv::cluster::mean_shift::kernel::Epanechnikov>();
82
83 // Run disparity estimation, the output will contain a disparity estimate for each of the given points.
84 const std::vector<dv::SparseEventBlockMatcher::PixelDisparity> estimates
85 = matcher.computeDisparitySparse(leftEventBuffer, rightEventBuffer, dv::data::convertToCvPoints(centers));
86
87 // Convert the accumulated frames into colored images for preview.
88 std::vector<cv::Mat> images(2);
89 cv::cvtColor(matcher.getLeftFrame().image, images[0], cv::COLOR_GRAY2BGR);
90 cv::cvtColor(matcher.getRightFrame().image, images[1], cv::COLOR_GRAY2BGR);
91
92 // Visualize the matched blocks
93 int32_t index = 0;
94 for (const auto &point : estimates) {
95 // If point estimation is invalid, do not show a preview of it
96 if (!point.valid) {
97 continue;
98 }
99
100 // The rest of the code performs drawing of the match according to the disparity value on the
101 // preview images.
102 const cv::Scalar color = dv::visualization::colors::someNeonColor(index++);
103 // Draw some nice colored markers and rectangles.
104 cv::drawMarker(images[1], *point.matchedPosition, color, cv::MARKER_CROSS, 7);
105 cv::rectangle(images[1],
106 cv::Rect(point.matchedPosition->x - (window.width / 2), point.matchedPosition->y - (window.height / 2),
107 window.width, window.height),
108 color);
109 cv::rectangle(images[0],
110 cv::Rect(point.templatePosition->x - (window.width / 2),
111 point.templatePosition->y - (window.height / 2), window.width, window.height),
112 color);
113 }
114
115 // Concatenate images and show them in a window
116 cv::Mat preview;
117 cv::hconcat(images, preview);
118 cv::imshow("Preview", preview);
119 });
120
121 // Buffer input events in these variables to synchronize inputs
122 std::optional<dv::EventStore> leftEvents = std::nullopt;
123 std::optional<dv::EventStore> rightEvents = std::nullopt;
124
125 // Run the processing loop while both cameras are connected
126 while (capture.left.isRunning() && capture.right.isRunning()) {
127 // Read events from respective left / right cameras
128 if (!leftEvents.has_value()) {
129 leftEvents = capture.left.getNextEventBatch();
130 }
131 if (!rightEvents.has_value()) {
132 rightEvents = capture.right.getNextEventBatch();
133 }
134
135 // Feed the data into the slicer and reset the buffer
136 if (leftEvents && rightEvents) {
137 slicer.accept(*leftEvents, *rightEvents);
138 leftEvents = std::nullopt;
139 rightEvents = std::nullopt;
140 }
141
142 // Wait for a small amount of time to avoid CPU overhaul
143 cv::waitKey(1);
144 }
145
146 return 0;
147}
1import dv_processing as dv
2import cv2 as cv
3from datetime import timedelta
4
5# Path to a stereo calibration file, replace with a file path on your local file system
6calibration_file_path = "path/to/calibration.json"
7
8# Load the calibration file
9calibration = dv.camera.CalibrationSet.LoadFromFile(calibration_file_path)
10
11# It is expected that calibration file will have "C0" as the leftEventBuffer camera
12left_camera = calibration.getCameraCalibration("C0")
13
14# The second camera is assumed to be rightEventBuffer-side camera
15right_camera = calibration.getCameraCalibration("C1")
16
17# Open the stereo camera with camera names from calibration
18capture = dv.io.StereoCapture(left_camera.name, right_camera.name)
19
20# Make sure both cameras support event stream output, throw an error otherwise
21if not capture.left.isEventStreamAvailable() or not capture.right.isEventStreamAvailable():
22 raise RuntimeError("Input camera does not provide an event stream.")
23
24# Matching window size for the block matcher
25window = (24, 24)
26
27# Minimum disparity value to measure
28min_disparity = 0
29
30# Maximum disparity value
31max_disparity = 40
32
33# Minimum z-score value that a valid match can have
34min_score = 0.0
35
36# Initialize the block matcher with rectification
37matcher = dv.SparseEventBlockMatcher(dv.camera.StereoGeometry(left_camera, right_camera), window, max_disparity,
38 min_disparity, min_score)
39
40# Initialization of a stereo event sliver
41slicer = dv.StereoEventStreamSlicer()
42
43# Initialize a window to show previews of the output
44cv.namedWindow("Preview", cv.WINDOW_NORMAL)
45
46# Local event buffers to implement overlapping window of events for accumulation
47global left_event_buffer, right_event_buffer
48left_event_buffer = dv.EventStore()
49right_event_buffer = dv.EventStore()
50
51# Use one third of the resolution as count of events per accumulated frame
52event_count = int((left_camera.resolution[0] * left_camera.resolution[1]) / 3)
53
54
55# Stereo slicer callback method
56def callback(left_events: dv.EventStore, right_events: dv.EventStore):
57 # Push input events into the local buffers
58 global left_event_buffer, right_event_buffer
59 left_event_buffer.add(left_events)
60 right_event_buffer.add(right_events)
61
62 # If the number of events is above the count, just keep the latest events
63 if len(left_event_buffer) > event_count:
64 left_event_buffer = left_event_buffer.sliceBack(event_count)
65 if len(right_event_buffer) > event_count:
66 right_event_buffer = right_event_buffer.sliceBack(event_count)
67
68 # Number of clusters to extract
69 num_clusters = 100
70
71 # Initialize the mean-shift clustering algorithm
72 mean_shift = dv.cluster.mean_shift.MeanShiftEventStoreAdaptor(left_event_buffer, 10, 1, 20, num_clusters)
73
74 # Find cluster centers which are going to be used for disparity estimation
75 centers = mean_shift.findClusterCentresEpanechnikov()
76
77 # Run disparity estimation, the output will contain a disparity estimate for each of the given points.
78 estimates = matcher.computeDisparitySparse(left_event_buffer, right_event_buffer, list(map(lambda x: x.pt,
79 centers)))
80
81 # Convert the accumulated frames into colored images for preview.
82 images = []
83 images.append(cv.cvtColor(matcher.getLeftFrame().image, cv.COLOR_GRAY2BGR))
84 images.append(cv.cvtColor(matcher.getRightFrame().image, cv.COLOR_GRAY2BGR))
85
86 # Visualize the matched blocks
87 index = 0
88 for point in estimates:
89 # If point estimation is invalid, do not show a preview of it
90 if not point.valid:
91 continue
92
93 # The rest of the code performs drawing of the match according to the disparity value on the
94 # preview images.
95 color = dv.visualization.colors.someNeonColor(index)
96 index += 1
97
98 # Draw some nice colored markers and rectangles.
99 cv.drawMarker(images[1], point.matchedPosition, color, cv.MARKER_CROSS, 7)
100 cv.rectangle(images[1],
101 (int(point.matchedPosition[0] - (window[0] / 2)), int(point.matchedPosition[1] - (window[1] / 2))),
102 (int(point.matchedPosition[0] + (window[0] / 2)), int(point.matchedPosition[1] + (window[1] / 2))),
103 color)
104 cv.rectangle(
105 images[0],
106 (int(point.templatePosition[0] - (window[0] / 2)), int(point.templatePosition[1] - (window[1] / 2))),
107 (int(point.templatePosition[0] + (window[0] / 2)), int(point.templatePosition[1] + (window[1] / 2))), color)
108
109 # Concatenate images and show them in a window
110 cv.imshow("Preview", cv.hconcat(images))
111
112
113# Register a callback to be done at 30Hz
114slicer.doEveryTimeInterval(timedelta(milliseconds=33), callback)
115
116# Buffer input events in these variables to synchronize inputs
117left_events = None
118right_events = None
119
120# Run the processing loop while both cameras are connected
121while capture.left.isRunning() and capture.right.isRunning():
122 # Read events from respective left / right cameras
123 if left_events is None:
124 left_events = capture.left.getNextEventBatch()
125 if right_events is None:
126 right_events = capture.right.getNextEventBatch()
127
128 # Feed the data into the slicer and reset the buffer
129 if left_events is not None and right_events is not None:
130 slicer.accept(left_events, right_events)
131 left_events = None
132 right_events = None
133
134 # Wait for a small amount of time to avoid CPU overhaul
135 cv.waitKey(1)
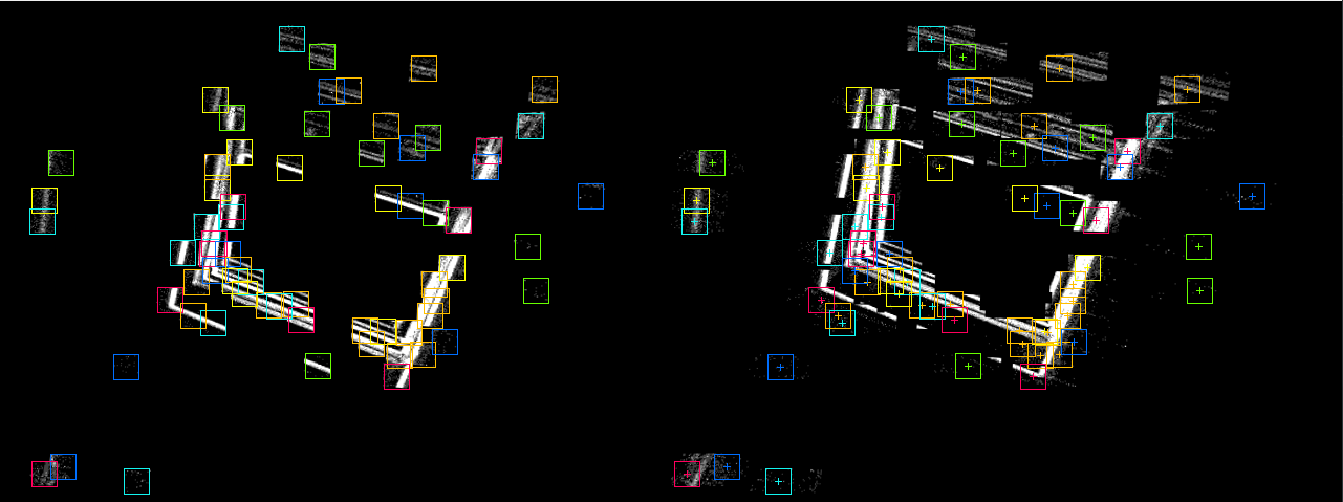
Expected result of sparse disparity estimation. The colored rectangles represent sparse blocks that are matched on the right side image. Block colors are matched on both images. Note that frame are sparse as well - the accumulation happens only in relevant areas around points of interest. The points of interest are selected on high density event areas as per mean-shift cluster extraction.