Feature detection in events
The dv-processing library provides extensible interfaces and implementations for feature detection on event streams. Features are certain locations of interest in the data that can be detected with repeatability, such as corners. The detected features can be tracked over time in the event stream, so the library provides a reusable interface for feature detection algorithm implementations that can be used with a tracking algorithm.
Feature detectors
This section describes available feature detectors and their basic usage.
Feature detector using OpenCV
The most basic use of a feature detector is to use OpenCV feature detector implementation with the dv-processing feature
detector wrapper on a dv::Frame. The feature detection wrapper base class
dv::features::FeatureDetector was designed to wrap a feature detection algorithm and provide a few
additional processing steps to handle image margins (ignore feature that are very close to edge of the image) and
subsampling as a post-detection step (sampling only an optimal set of features).
Margins are set by a floating-point coefficient value, which expresses a relative margin size from the resolution of an input image, e.g. 0.05 would set the margins of 5% of the total width / height of the image.
Only a select number of features are useful for most applications. The dv::features::FeatureDetector
simplifies feature subsampling by providing a post-processing step that sub-samples the output features. The
sub-sampling can be performed by enabling one the following post-processing options:
None: Do not perform any post-processing, all features from detection will be returned.TopN: Retrieve a given number of the highest scoring features.AdaptiveNMS: Apply the AdaptiveNMS algorithm to retrieve equally spaced features in pixel space dimensions. More information on the AdaptiveNMS here: original code and paper .
The following code sample shows how to detect the “good features to track” from OpenCV on an accumulated image from a live camera:
1#include <dv-processing/core/frame.hpp>
2#include <dv-processing/features/feature_detector.hpp>
3#include <dv-processing/io/camera_capture.hpp>
4
5#include <opencv2/features2d.hpp>
6#include <opencv2/highgui.hpp>
7
8int main() {
9 using namespace std::chrono_literals;
10
11 // Open any camera
12 dv::io::CameraCapture capture;
13
14 // Make sure it supports event stream output, throw an error otherwise
15 if (!capture.isEventStreamAvailable()) {
16 throw dv::exceptions::RuntimeError("Input camera does not provide an event stream.");
17 }
18
19 // Initialize an accumulator with camera resolution
20 dv::Accumulator accumulator(*capture.getEventResolution());
21
22 // Initialize a preview window
23 cv::namedWindow("Preview", cv::WINDOW_NORMAL);
24
25 // Let's detect 100 features
26 const size_t numberOfFeatures = 100;
27
28 // Create an image feature detector with given resolution. By default, it uses FAST feature detector
29 // with AdaptiveNMS post-processing.
30 auto detector = dv::features::ImageFeatureDetector(*capture.getEventResolution(), cv::GFTTDetector::create());
31
32 // Initialize a slicer
33 dv::EventStreamSlicer slicer;
34
35 // Register a callback every 33 milliseconds
36 slicer.doEveryTimeInterval(33ms, [&accumulator, &detector](const dv::EventStore &events) {
37 // Pass events into the accumulator and generate a preview frame
38 accumulator.accept(events);
39 dv::Frame frame = accumulator.generateFrame();
40
41 // Run the feature detection on the accumulated frame
42 const auto features = detector.runDetection(frame, numberOfFeatures);
43
44 // Create a colored preview image by converting from grayscale to BGR
45 cv::Mat preview;
46 cv::cvtColor(frame.image, preview, cv::COLOR_GRAY2BGR);
47
48 // Draw detected features
49 cv::drawKeypoints(preview, dv::data::fromTimedKeyPoints(features), preview);
50
51 // Show the accumulated image
52 cv::imshow("Preview", preview);
53 cv::waitKey(2);
54 });
55
56 // Run the event processing while the camera is connected
57 while (capture.isRunning()) {
58 // Receive events, check if anything was received
59 if (const auto events = capture.getNextEventBatch()) {
60 // If so, pass the events into the slicer to handle them
61 slicer.accept(*events);
62 }
63 }
64
65 return 0;
66}
1import dv_processing as dv
2import cv2 as cv
3from datetime import timedelta
4
5# Open any camera
6capture = dv.io.CameraCapture()
7
8# Make sure it supports event stream output, throw an error otherwise
9if not capture.isEventStreamAvailable():
10 raise RuntimeError("Input camera does not provide an event stream.")
11
12# Initialize an accumulator with some resolution
13accumulator = dv.Accumulator(capture.getEventResolution())
14
15# Initialize preview window
16cv.namedWindow("Preview", cv.WINDOW_NORMAL)
17
18# Let's detect 100 features
19number_of_features = 100
20
21# Create an image feature detector with given resolution. By default, it uses FAST feature detector
22# with AdaptiveNMS post-processing.
23detector = dv.features.ImageFeatureDetector(capture.getEventResolution())
24
25# Initialize a slicer
26slicer = dv.EventStreamSlicer()
27
28
29# Declare the callback method for slicer
30def slicing_callback(events: dv.EventStore):
31 # Pass events into the accumulator and generate a preview frame
32 accumulator.accept(events)
33 frame = accumulator.generateFrame()
34
35 # Run the feature detection on the accumulated frame
36 features = detector.runDetection(frame, number_of_features)
37
38 # Create a colored preview image by converting from grayscale to BGR
39 preview = cv.cvtColor(frame.image, cv.COLOR_GRAY2BGR)
40 for feature in features:
41 # Draw a rectangle marker on each feature location
42 cv.drawMarker(preview, (int(feature.pt[0]), int(feature.pt[1])),
43 dv.visualization.colors.someNeonColor(feature.class_id), cv.MARKER_SQUARE, 10, 2)
44
45 # Show the accumulated image
46 cv.imshow("Preview", preview)
47 cv.waitKey(2)
48
49
50# Register a callback every 33 milliseconds
51slicer.doEveryTimeInterval(timedelta(milliseconds=33), slicing_callback)
52
53# Run the event processing while the camera is connected
54while capture.isRunning():
55 # Receive events
56 events = capture.getNextEventBatch()
57
58 # Check if anything was received
59 if events is not None:
60 # If so, pass the events into the slicer to handle them
61 slicer.accept(events)
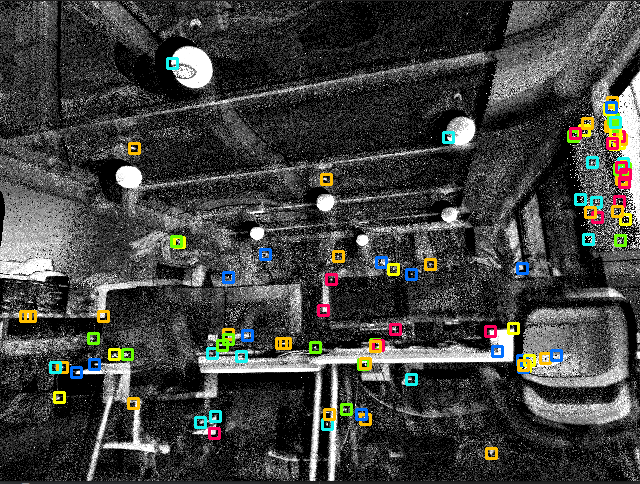
Detected “good features to track” on an accumulated image.
Arc* Feature detector
The library provides an implementation of Arc* feature detector. Arc* performs corner detection on a per-event basis,
so it uses dv::EventStore as an input. More details on this feature detection algorithm can be found in the
original paper publication
.
1#include <dv-processing/core/frame.hpp>
2#include <dv-processing/features/arc_corner_detector.hpp>
3#include <dv-processing/features/feature_detector.hpp>
4#include <dv-processing/io/camera_capture.hpp>
5#include <dv-processing/visualization/colors.hpp>
6
7#include <opencv2/features2d.hpp>
8#include <opencv2/highgui.hpp>
9
10int main() {
11 using namespace std::chrono_literals;
12
13 // Open any camera
14 dv::io::CameraCapture capture;
15
16 // Make sure it supports event stream output, throw an error otherwise
17 if (!capture.isEventStreamAvailable()) {
18 throw dv::exceptions::RuntimeError("Input camera does not provide an event stream.");
19 }
20
21 const auto resolution = *capture.getEventResolution();
22
23 // Initialize an accumulator with camera resolution
24 dv::Accumulator accumulator(resolution);
25
26 // Initialize a preview window
27 cv::namedWindow("Preview", cv::WINDOW_NORMAL);
28
29 // Let's detect 100 features
30 const size_t numberOfFeatures = 100;
31
32 // Create an Arc* feature detector with given resolution. Corner range is set to 5 millisecond.
33 auto detector = dv::features::FeatureDetector<dv::EventStore, dv::features::ArcCornerDetector<>>(
34 resolution, std::make_shared<dv::features::ArcCornerDetector<>>(resolution, 5000, false));
35
36 // Initialize a slicer
37 dv::EventStreamSlicer slicer;
38
39 // Register a callback every 33 milliseconds
40 slicer.doEveryTimeInterval(33ms, [&accumulator, &detector](const dv::EventStore &events) {
41 // Run the feature detection on the incoming events. Features are extracted on a per-event basis
42 const auto features = detector.runDetection(events, numberOfFeatures);
43
44 // Run accumulator for an image, it is going to be used only for preview
45 accumulator.accept(events);
46 const dv::Frame frame = accumulator.generateFrame();
47
48 // Create a colored preview image by converting from grayscale to BGR
49 cv::Mat preview;
50 cv::cvtColor(frame.image, preview, cv::COLOR_GRAY2BGR);
51
52 // Draw detected features
53 cv::drawKeypoints(preview, dv::data::fromTimedKeyPoints(features), preview);
54
55 // Show the accumulated image
56 cv::imshow("Preview", preview);
57 cv::waitKey(2);
58 });
59
60 // Run the event processing while the camera is connected
61 while (capture.isRunning()) {
62 // Receive events, check if anything was received
63 if (const auto events = capture.getNextEventBatch()) {
64 // If so, pass the events into the slicer to handle them
65 slicer.accept(*events);
66 }
67 }
68
69 return 0;
70}
1import dv_processing as dv
2import cv2 as cv
3from datetime import timedelta
4
5# Open any camera
6capture = dv.io.CameraCapture()
7
8# Make sure it supports event stream output, throw an error otherwise
9if not capture.isEventStreamAvailable():
10 raise RuntimeError("Input camera does not provide an event stream.")
11
12# Initialize an accumulator with some resolution
13accumulator = dv.Accumulator(capture.getEventResolution())
14
15# Initialize preview window
16cv.namedWindow("Preview", cv.WINDOW_NORMAL)
17
18# Let's detect 100 features
19number_of_features = 100
20
21# Create an Arc* feature detector with given resolution. Corner range is set to 5 millisecond.
22detector = dv.features.ArcEventFeatureDetector(capture.getEventResolution(), 5000, False)
23
24# Initialize a slicer
25slicer = dv.EventStreamSlicer()
26
27
28# Declare the callback method for slicer
29def slicing_callback(events: dv.EventStore):
30 # Run the feature detection on the incoming events
31 features = detector.runDetection(events, number_of_features)
32
33 # Pass events into the accumulator and generate a preview frame
34 accumulator.accept(events)
35 frame = accumulator.generateFrame()
36
37 # Create a colored preview image by converting from grayscale to BGR
38 preview = cv.cvtColor(frame.image, cv.COLOR_GRAY2BGR)
39 for feature in features:
40 # Draw a rectangle marker on each feature location
41 cv.drawMarker(preview, (int(feature.pt[0]), int(feature.pt[1])),
42 dv.visualization.colors.someNeonColor(feature.class_id), cv.MARKER_SQUARE, 10, 2)
43
44 # Show the accumulated image
45 cv.imshow("Preview", preview)
46 cv.waitKey(2)
47
48
49# Register a callback every 33 milliseconds
50slicer.doEveryTimeInterval(timedelta(milliseconds=33), slicing_callback)
51
52# Run the event processing while the camera is connected
53while capture.isRunning():
54 # Receive events
55 events = capture.getNextEventBatch()
56
57 # Check if anything was received
58 if events is not None:
59 # If so, pass the events into the slicer to handle them
60 slicer.accept(events)
Note
The provided implementation is not suitable for running real-time with high event rates.
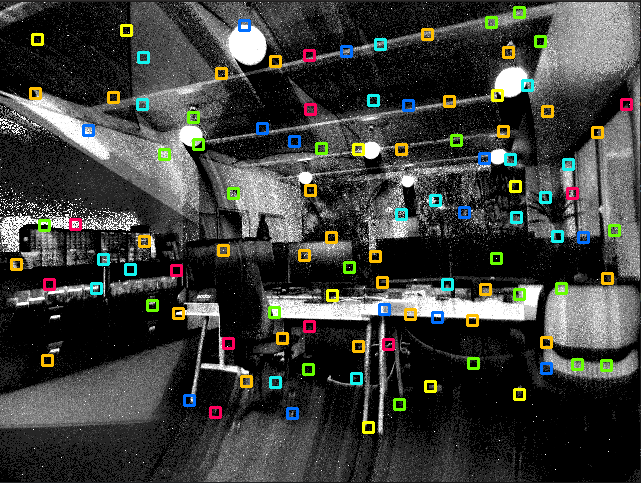
Detected Arc* features displayed on an accumulated image.
Event-based blob detector
The library provides an implementation of a simple event-based blob detector. The class makes use of
cv::SimpleBlobDetector to detect blobs on an image. The image is generated using dv::EdgeMapAccumulator. A
default cv::SimpleBlobDetector is provided with reasonable values to safely detect blobs and not noise in the
accumulated image. It is also possible to specify the detector that should be used to find the blobs and some specific
region of interests in the image plane where the blobs should be searched. In addition to this, eventually, it is also
possible to specify the down sampling factor to be applied to the image before performing the detection and also specify
any additional pre-processing step that should be applied before running the actual detection step. In summary, the
detection steps are as following:
Compute accumulated image from events
Apply ROI and mask to the accumulated event image
Down sample image (optional)
Apply pre-process function (optional)
Detect blobs
Rescale blobs to original resolution (if down sampling was performed)
1#include <dv-processing/features/event_blob_detector.hpp>
2#include <dv-processing/features/feature_detector.hpp>
3#include <dv-processing/io/camera_capture.hpp>
4#include <dv-processing/visualization/colors.hpp>
5
6#include <opencv2/features2d.hpp>
7#include <opencv2/highgui.hpp>
8
9int main() {
10 using namespace std::chrono_literals;
11
12 // Open any camera
13 dv::io::CameraCapture capture;
14
15 // Make sure it supports event stream output, throw an error otherwise
16 if (!capture.isEventStreamAvailable()) {
17 throw dv::exceptions::RuntimeError("Input camera does not provide an event stream.");
18 }
19
20 const auto resolution = *capture.getEventResolution();
21
22 // Initialize an accumulator with camera resolution (for visualization only)
23 dv::Accumulator accumulator(resolution);
24
25 // Initialize a preview window
26 cv::namedWindow("Preview", cv::WINDOW_NORMAL);
27
28 // Let's detect up to 100 features
29 const size_t numberOfFeatures = 100;
30
31 // define preprocessing step (here we do nothing but show how it can be implemented)
32 std::function<void(cv::Mat &)> preprocess = [](cv::Mat &image) {
33 };
34
35 // Define number of pyr-down to be applied to the image before detecting blobs. If pyramidLevel is set to zero, the
36 // blobs will be detected on the original image resolution, if pyramid level is one, the image will be down sampled
37 // by a factor of 2 (factor of 4 if pyramid level is 2 and so on...) before performing the detection. The blobs will
38 // then be scaled back to the original resolution size.
39 const int32_t pyramidLevel = 0;
40 // Create an event-based blob detector
41 const auto blobDetector = std::make_shared<dv::features::EventBlobDetector>(resolution, pyramidLevel, preprocess);
42 auto detector = dv::features::EventFeatureBlobDetector(resolution, blobDetector);
43
44 // Initialize a slicer
45 dv::EventStreamSlicer slicer;
46
47 // Register a callback every 33 milliseconds
48 slicer.doEveryTimeInterval(33ms, [&accumulator, &detector](const dv::EventStore &events) {
49 // Run the feature detection on the incoming events.
50 const auto features = detector.runDetection(events, numberOfFeatures);
51
52 // Run accumulator for an image, it is going to be used only for preview
53 accumulator.accept(events);
54 const dv::Frame frame = accumulator.generateFrame();
55
56 // Create a colored preview image by converting from grayscale to BGR
57 cv::Mat preview;
58 cv::cvtColor(frame.image, preview, cv::COLOR_GRAY2BGR);
59
60 // Draw detected features
61 cv::drawKeypoints(preview, dv::data::fromTimedKeyPoints(features), preview);
62
63 // Show the accumulated image
64 cv::imshow("Preview", preview);
65 cv::waitKey(2);
66 });
67
68 // Run the event processing while the camera is connected
69 while (capture.isRunning()) {
70 // Receive events, check if anything was received
71 if (const auto events = capture.getNextEventBatch()) {
72 // If so, pass the events into the slicer to handle them
73 slicer.accept(*events);
74 }
75 }
76
77 return 0;
78}
1import dv_processing as dv
2import cv2 as cv
3from datetime import timedelta
4
5
6def preprocess(image):
7 # add your pre precessing here..
8 return image
9
10
11# Open any camera
12capture = dv.io.CameraCapture()
13
14# Make sure it supports event stream output, throw an error otherwise
15if not capture.isEventStreamAvailable():
16 raise RuntimeError("Input camera does not provide an event stream.")
17
18# Initialize an accumulator with some resolution (for visualization only)
19accumulator = dv.Accumulator(capture.getEventResolution())
20
21# Initialize preview window
22cv.namedWindow("Preview", cv.WINDOW_NORMAL)
23
24# Let's detect 100 features
25number_of_features = 100
26
27# Define number of pyr-down to be applied to the image before detecting blobs. If pyramidLevel is set to zero, the
28# blobs will be detected on the original image resolution, if pyramid level is one, the image will be down sampled by a
29# factor of 2 (factor of 4 if pyramid level is 2 and so on..) before perfirming the detection. The blobs will then be
30# scaled back to the original resolution size.
31pyramidLevel = 0
32
33# Create an event-based blob detector
34detector = dv.features.EventFeatureBlobDetector(capture.getEventResolution(), pyramidLevel, preprocess)
35
36# Initialize a slicer
37slicer = dv.EventStreamSlicer()
38
39
40# Declare the callback method for slicer
41def slicing_callback(events: dv.EventStore):
42 # Run the feature detection on the incoming events
43 features = detector.runDetection(events, number_of_features)
44
45 # Pass events into the accumulator and generate a preview frame
46 accumulator.accept(events)
47 frame = accumulator.generateFrame()
48
49 # Create a colored preview image by converting from grayscale to BGR
50 preview = cv.cvtColor(frame.image, cv.COLOR_GRAY2BGR)
51 for feature in features:
52 # Draw a rectangle marker on each feature location
53 cv.drawMarker(preview, (int(feature.pt[0]), int(feature.pt[1])),
54 dv.visualization.colors.someNeonColor(feature.class_id), cv.MARKER_SQUARE, 10, 2)
55
56 # Show the accumulated image
57 cv.imshow("Preview", preview)
58 cv.waitKey(2)
59
60
61# Register a callback every 33 milliseconds
62slicer.doEveryTimeInterval(timedelta(milliseconds=33), slicing_callback)
63
64# Run the event processing while the camera is connected
65while capture.isRunning():
66 # Receive events
67 events = capture.getNextEventBatch()
68
69 # Check if anything was received
70 if events is not None:
71 # If so, pass the events into the slicer to handle them
72 slicer.accept(events)