Welcome to dv-processing’s documentation!
Generic processing algorithms for event cameras.
Introduction
This documentation describes the API and the algorithms available in the dv-processing library. The documentation
covers the basic usage of the library for event camera data processing. The library builds on top of C++20 coding
standard, provides state-of-the-art algorithms to process event data streams from iniVation cameras with high
efficiency. The library also provides Python bindings that allows users to develop high performance event processing
application in Python as well. Since the library is built on top of modern C++, it extensively uses template
metaprogramming to provide extensible and performant implementations of event processing algorithms. Python bindings
have some limitations due to the of use templates, but most applications can be developed using Python alone. Extensive
code samples in both C++ and Python are provided next to algorithm description, the samples also follow modern coding
style conventions. More information about the coding style convention can be found
here. Code samples apply the
constant and immutability rules
from the previously mentioned document.
Getting started
This section covers installation and usage of the library in Linux , Windows , and MacOS . Usage in CMake projects is covered for the C++ API, and pip installation is preferred for Python projects.
Basics
This section covers the very basic features of this library:
Storing events in memory and efficiently accessing them;
Frame image accumulation algorithms from events;
Noise filtering in events and efficient subsampling;
Input/Output of event data: live camera access, as well as reading / writing data from a file.

Frame generated using dv::EdgeMapAccumulator class.
Vision algorithms
This chapter describes the available event processing algorithms that can are building blocks for computer vision with event cameras. Most notable algorithms and features:
Camera geometry - sensor calibration, pixel projections, lens undistortion operations;
Feature detection and tracking
Minimal kinematics routines
Mean-shift clustering
Tracked features on frame and event streams from a camera.
Advanced applications
This section describes the use of available library features and algorithms to build more complex applications and algorithms for: depth estimation, motion compensation and contrast maximization.
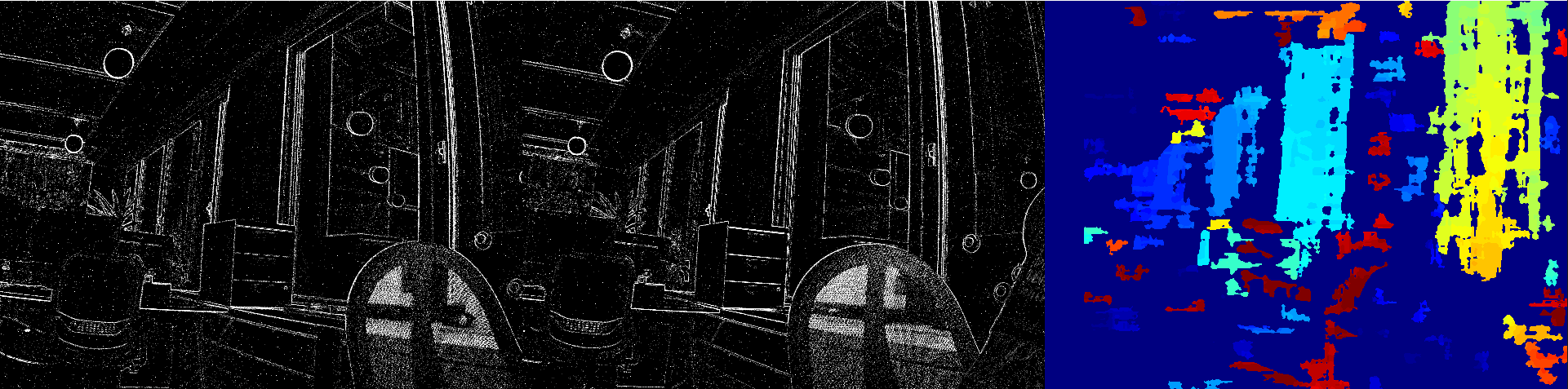
Expected result of semi-dense disparity estimation. The output provides two accumulated frames and color-coded disparity map.
API
API documentation provides references for available classes and methods in the library. You can find detailed documentation on each method for their use case, function arguments, and produced outputs.
Help
In case of technical issues or any problems, please visit the support page. Any issues in the documentation or the code can be reported to our gitlab issue tracker.