Filtering events
Event stream coming from a camera can contain noise, which is caused by analog electrical circuitry used to compare brightness on each pixel. The dv-processing library provides algorithms that filter noise efficiently on an event stream. Additionally, filtering can be used to subsample events in region of interest, filter by polarity, apply masks to events. This tutorial covers available filter implementations and how to use them efficiently.
Implementation of filters
The library provides two main types of filters - noise and subsampling. Subsampling filters include polarity filters,
region of interest, mask filters. The library provides two algorithms for filtering noise that can be found under
namespace dv::noise. Below is a class hierarchy diagram for available noise filters:
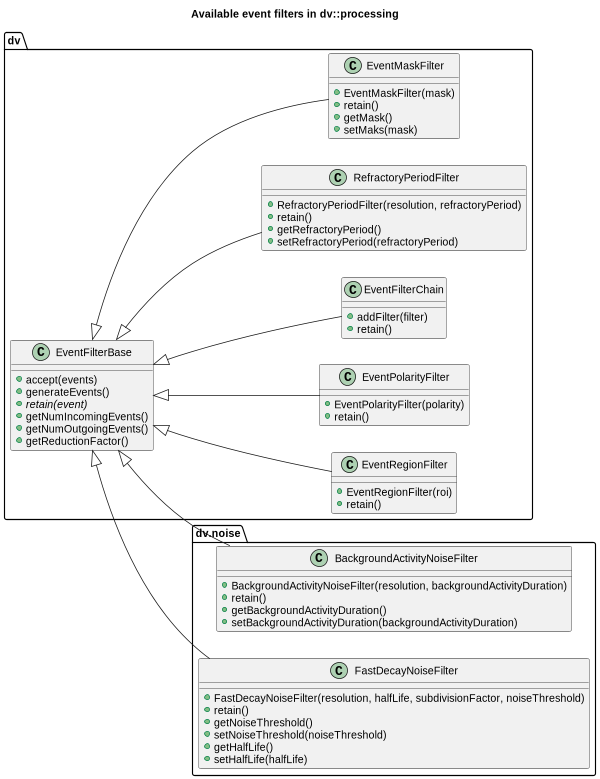
Available filters and their hierarchy in the library.
All filter have a common programming pattern:
Events are added to the filter instance using overloaded
dv::EventFilterBase::accept()method.Input events are filtered and returned by calling overloaded
dv::EventFilterBase::generateEvents()method.Internally events are filtered by calling a filter
retain()method on each event and discarding events if afalseis returned.
Noise filtering
This chapter describes the available event noise filters in the library.
Background activity noise filter
dv::noise::BackgroundActivityNoiseFilter - events are filtered based on short-term local neighborhood
activity. If an event is “supported” by another event registered at local pixel neighborhood, that event is not
considered noise and is added to the output events.
Following sample code shows the usage of the dv::noise::BackgroundActivityNoiseFilter to filter noise:
1#include <dv-processing/data/generate.hpp>
2#include <dv-processing/noise/background_activity_noise_filter.hpp>
3#include <dv-processing/visualization/event_visualizer.hpp>
4
5#include <opencv2/highgui.hpp>
6
7int main() {
8 using namespace std::chrono_literals;
9
10 // Hardcoded VGA resolution
11 const cv::Size resolution(640, 480);
12
13 // Initializing input events with uniformly distributed events which represent noise
14 dv::EventStore events = dv::data::generate::uniformEventsWithinTimeRange(0, 10ms, resolution, 1000);
15
16 // Adding additional data for drawing, this will give an idea whether the filter removes actual signal events
17 events.add(dv::data::generate::dvLogoAsEvents(10000, resolution));
18
19 // Initialize a background activity noise filter with 1-millisecond activity period
20 dv::noise::BackgroundActivityNoiseFilter filter(resolution, 1ms);
21
22 // Pass events to the filter
23 filter.accept(events);
24
25 // Call generate events to apply the noise filter
26 const dv::EventStore filtered = filter.generateEvents();
27
28 // Print out the reduction factor, which indicates the percentage of discarded events
29 std::cout << "Filter reduced number of events by a factor of " << filter.getReductionFactor() << std::endl;
30
31 // Use a visualizer instance to preview the events
32 dv::visualization::EventVisualizer visualizer(resolution);
33
34 // Generate preview images of data input and output
35 const cv::Mat input = visualizer.generateImage(events);
36 const cv::Mat output = visualizer.generateImage(filtered);
37
38 // Concatenate the images into a single image for preview
39 cv::Mat preview;
40 cv::hconcat(input, output, preview);
41
42 // Display the input and output images
43 cv::namedWindow("preview", cv::WINDOW_NORMAL);
44 cv::imshow("preview", preview);
45 cv::waitKey();
46
47 return 0;
48}
1import dv_processing as dv
2import cv2 as cv
3from datetime import timedelta
4
5# Hardcoded VGA resolution
6resolution = (640, 480)
7
8# Initializing input events with uniformly distributed events which represent noise
9events = dv.data.generate.uniformEventsWithinTimeRange(0, timedelta(milliseconds=10), resolution, 1000)
10
11# Adding additional data for drawing, this will give an idea whether the filter removes actual signal events
12events.add(dv.data.generate.dvLogoAsEvents(10000, resolution))
13
14# Initialize a background activity noise filter with 1-millisecond activity period
15filter = dv.noise.BackgroundActivityNoiseFilter(resolution, backgroundActivityDuration=timedelta(milliseconds=1))
16
17# Pass events to the filter
18filter.accept(events)
19
20# Call generate events to apply the noise filter
21filtered = filter.generateEvents()
22
23# Print out the reduction factor, which indicates the percentage of discarded events
24print(f"Filter reduced number of events by a factor of {filter.getReductionFactor()}")
25
26# Use a visualizer instance to preview the events
27visualizer = dv.visualization.EventVisualizer(resolution)
28
29# Generate preview images of data input and output
30input = visualizer.generateImage(events)
31output = visualizer.generateImage(filtered)
32
33# Concatenate the images into a single image for preview
34preview = cv.hconcat([input, output])
35
36# Display the input and output images
37cv.namedWindow("preview", cv.WINDOW_NORMAL)
38cv.imshow("preview", preview)
39cv.waitKey()
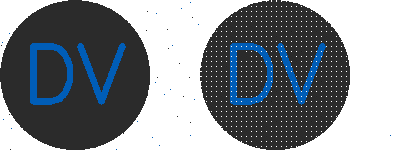
The sample code outputs such images:

Output of the sample use of background activity filter. Left is a preview of input events, right is a preview of filtered events.
Note
The image above that the filter reduces the amount of speckles on white area, but maintains the logo preview, those events are not filtered out.
Fast decay noise filter
dv::noise::FastDecayNoiseFilter - events are filtered based on lower resolution fast-decaying
representation of events. Events contribute to a low-resolution accumulated image with a fast decay, which also
represents local activity. Unlike the BackgroundActivityNoiseFilter, this filter uses decay instead of a hard time
threshold, although the approach is very similar - an event needs to be supported by another event in a local pixel
neighborhood. This filter has a lower memory footprint since the neighborhood is represented in a low resolution
accumulated image.
Following sample code shows the usage of the dv::noise::FastDecayNoiseFilter to filter noise:
1#include <dv-processing/data/generate.hpp>
2#include <dv-processing/noise/fast_decay_noise_filter.hpp>
3#include <dv-processing/visualization/event_visualizer.hpp>
4
5#include <opencv2/highgui.hpp>
6
7int main() {
8 using namespace std::chrono_literals;
9
10 // Hardcoded VGA resolution
11 const cv::Size resolution(640, 480);
12
13 // Initializing input events with uniformly distributed events which represent noise
14 dv::EventStore events = dv::data::generate::uniformEventsWithinTimeRange(0, 10ms, resolution, 1000);
15
16 // Adding additional data for drawing, this will give an idea whether the filter removes actual signal events
17 events.add(dv::data::generate::dvLogoAsEvents(10000, resolution));
18
19 // Initialize a background activity noise filter with 10-millisecond half life decay, resolution subdivision
20 // factor of 4 and noise threshold of 1. Half life decay and noise threshold values controls the quality of
21 // filtering, while subdivision factor is used for resolution downsizing for internal event representation.
22 dv::noise::FastDecayNoiseFilter filter(resolution, 10ms, 4, 1.f);
23
24 // Pass events to the filter
25 filter.accept(events);
26
27 // Call generate events to apply the noise filter
28 const dv::EventStore filtered = filter.generateEvents();
29
30 // Print out the reduction factor, which indicates the percentage of discarded events
31 std::cout << "Filter reduced number of events by a factor of " << filter.getReductionFactor() << std::endl;
32
33 // Use a visualizer instance to preview the events
34 dv::visualization::EventVisualizer visualizer(resolution);
35
36 // Generate preview images of data input and output
37 const cv::Mat input = visualizer.generateImage(events);
38 const cv::Mat output = visualizer.generateImage(filtered);
39
40 // Concatenate the images into a single image for preview
41 cv::Mat preview;
42 cv::hconcat(input, output, preview);
43
44 // Display the input and output images
45 cv::namedWindow("preview", cv::WINDOW_NORMAL);
46 cv::imshow("preview", preview);
47 cv::waitKey();
48
49 return 0;
50}
1import dv_processing as dv
2import cv2 as cv
3from datetime import timedelta
4
5# Hardcoded VGA resolution
6resolution = (640, 480)
7
8# Initializing input events with uniformly distributed events which represent noise
9events = dv.data.generate.uniformEventsWithinTimeRange(0, timedelta(milliseconds=10), resolution, 1000)
10
11# Adding additional data for drawing, this will give an idea whether the filter removes actual signal events
12events.add(dv.data.generate.dvLogoAsEvents(10000, resolution))
13
14# Initialize a background activity noise filter with 10-millisecond half life decay, resolution subdivision
15# factor of 4 and noise threshold of 1. Half life decay and noise threshold values controls the quality of
16# filtering, while subdivision factor is used for resolution downsizing for internal event representation.
17filter = dv.noise.FastDecayNoiseFilter(resolution,
18 halfLife=timedelta(milliseconds=10),
19 subdivisionFactor=4,
20 noiseThreshold=1.0)
21
22# Pass events to the filter
23filter.accept(events)
24
25# Call generate events to apply the noise filter
26filtered = filter.generateEvents()
27
28# Print out the reduction factor, which indicates the percentage of discarded events
29print(f"Filter reduced number of events by a factor of {filter.getReductionFactor()}")
30
31# Use a visualizer instance to preview the events
32visualizer = dv.visualization.EventVisualizer(resolution)
33
34# Generate preview images of data input and output
35input = visualizer.generateImage(events)
36output = visualizer.generateImage(filtered)
37
38# Concatenate the images into a single image for preview
39preview = cv.hconcat([input, output])
40
41# Display the input and output images
42cv.namedWindow("preview", cv.WINDOW_NORMAL)
43cv.imshow("preview", preview)
44cv.waitKey()
The sample code outputs such images:
Output of the sample use of fast decay noise filter. Left is a preview of input events, right is a preview of filtered events.
Note
The image above that the filter drastically the amount of speckles on white area, although the logo image is also affected and some true-signal events contributing to the logo are also filtered out.
Event subsampling
The same filtering approach is used to subsampling events based on their pixel location, polarity or other properties. This chapter describes the available event subsampling filters in the library.
Mask filter
dv::EventMaskFilter - filters events based on a pixel mask. Events are discarded in pixel locations where
mask has zero values.
Following sample code shows the usage of the dv::EventMaskFilter to filter out selected regions of events:
1#include <dv-processing/core/filters.hpp>
2#include <dv-processing/data/generate.hpp>
3#include <dv-processing/visualization/event_visualizer.hpp>
4
5#include <opencv2/highgui.hpp>
6
7int main() {
8 using namespace std::chrono_literals;
9
10 // Smaller resolution for previews
11 const cv::Size resolution(200, 200);
12
13 // Initializing input events with events that represent a logo
14 const dv::EventStore events = dv::data::generate::dvLogoAsEvents(0, resolution);
15
16 // Initialize a mask with all zero values
17 cv::Mat mask(resolution, CV_8UC1, cv::Scalar(0));
18
19 // Draw two rectangles to generate a similar to checkerboard mask pattern
20 cv::rectangle(
21 mask, cv::Point(0, 0), cv::Point(resolution.width / 2, resolution.height / 2), cv::Scalar(255), cv::FILLED);
22 cv::rectangle(mask, cv::Point(resolution.width / 2, resolution.height / 2),
23 cv::Point(resolution.width, resolution.height), cv::Scalar(255), cv::FILLED);
24
25 // Initialize the mask filter with the generated mask
26 dv::EventMaskFilter filter(mask);
27
28 // Pass events to the filter
29 filter.accept(events);
30
31 // Call generate events to apply the filter
32 const dv::EventStore filtered = filter.generateEvents();
33
34 // Print out the reduction factor, which indicates the percentage of discarded events
35 std::cout << "Filter reduced number of events by a factor of " << filter.getReductionFactor() << std::endl;
36
37 // Use a visualizer instance to preview the events
38 dv::visualization::EventVisualizer visualizer(resolution);
39
40 // Generate preview images of data input and output
41 const cv::Mat input = visualizer.generateImage(events);
42 const cv::Mat output = visualizer.generateImage(filtered);
43
44 // Concatenate the images into a single image for preview
45 cv::Mat preview, maskColored;
46 cv::cvtColor(mask, maskColored, cv::COLOR_GRAY2BGR);
47 cv::hconcat(std::vector<cv::Mat>({input, maskColored, output}), preview);
48
49 // Display the input and output images
50 cv::namedWindow("preview", cv::WINDOW_NORMAL);
51 cv::imshow("preview", preview);
52 cv::waitKey();
53
54 return 0;
55}
1import dv_processing as dv
2import cv2 as cv
3import numpy as np
4
5# Smaller resolution for previews
6resolution = (200, 200)
7
8# Initializing input events with events that represent a logo
9events = dv.data.generate.dvLogoAsEvents(0, resolution)
10
11# Initialize a mask with all zero values
12mask = np.full(resolution, fill_value=0, dtype=np.uint8)
13
14# Draw two rectangles to generate a similar to checkerboard mask pattern
15cv.rectangle(mask, [0, 0], [int(resolution[0] / 2), int(resolution[1] / 2)], (255, ), cv.FILLED)
16cv.rectangle(mask, [int(resolution[0] / 2), int(resolution[1] / 2)], resolution, (255, ), cv.FILLED)
17
18# Initialize the mask filter with the generated mask
19filter = dv.EventMaskFilter(mask)
20
21# Pass events to the filter
22filter.accept(events)
23
24# Call generate events to apply the filter
25filtered = filter.generateEvents()
26
27# Print out the reduction factor, which indicates the percentage of discarded events
28print(f"Filter reduced number of events by a factor of {filter.getReductionFactor()}")
29
30# Use a visualizer instance to preview the events
31visualizer = dv.visualization.EventVisualizer(resolution)
32
33# Generate preview images of data input and output
34input = visualizer.generateImage(events)
35output = visualizer.generateImage(filtered)
36
37# Concatenate the images into a single image for preview
38preview = cv.hconcat([input, cv.cvtColor(mask, cv.COLOR_GRAY2BGR), output])
39
40# Display the input and output images
41cv.namedWindow("preview", cv.WINDOW_NORMAL)
42cv.imshow("preview", preview)
43cv.waitKey()
The sample code outputs such images:
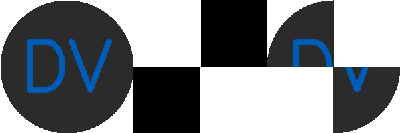
Output of the sample use of event mask filter. Left is a preview of input events, middle is the mask used, and right is a preview of filtered events.
Refractory period filter
dv::RefractoryPeriodFilter - refractory period filter discards bursts of events at repeating pixel
locations. Each event timestamp is compared against most recent event timestamp on the same pixel location, if the
timestamp difference is less than the refractory period, the event is discarded.
Following sample code shows the usage of the dv::RefractoryPeriodFilter to filter out events that are
within close time period on the same coordinate location:
1#include <dv-processing/core/filters.hpp>
2#include <dv-processing/data/generate.hpp>
3
4#include <opencv2/highgui.hpp>
5
6int main() {
7 using namespace std::chrono_literals;
8
9 const cv::Size resolution(200, 200);
10
11 // Initializing 10000 events that are uniformly spaced in pixel area and time
12 dv::EventStore events = dv::data::generate::uniformEventsWithinTimeRange(0, 10ms, resolution, 10000);
13
14 // Initialize refractory period filter with 1-millisecond period
15 dv::RefractoryPeriodFilter filter(resolution, 1ms);
16
17 // Pass events to the filter
18 filter.accept(events);
19
20 // Call generate events to apply the filter
21 const dv::EventStore filtered = filter.generateEvents();
22
23 // Print out the number of events after filtering
24 std::cout << "Filtered [" << filtered.size() << "] events out of [" << events.size() << "]" << std::endl;
25
26 return 0;
27}
1import dv_processing as dv
2import cv2 as cv
3from datetime import timedelta
4
5resolution = (200, 200)
6
7# Initializing 10000 events that are uniformly spaced in pixel area and time
8events = dv.data.generate.uniformEventsWithinTimeRange(0, timedelta(milliseconds=10), resolution, 10000)
9
10# Initialize refractory period filter with 1-millisecond period
11filter = dv.RefractoryPeriodFilter(resolution, timedelta(milliseconds=1))
12
13# Pass events to the filter
14filter.accept(events)
15
16# Call generate events to apply the filter
17filtered = filter.generateEvents()
18
19# Print out the number of events after filtering
20print(f"Filtered [{len(filtered)}] events ouf of [{len(events)}]")
Polarity filter
dv::EventPolarityFilter - filter events based on polarity.
Following sample code shows the usage of the dv::EventPolarityFilter to filter out events based on
polarity:
1#include <dv-processing/core/filters.hpp>
2#include <dv-processing/data/generate.hpp>
3#include <dv-processing/visualization/event_visualizer.hpp>
4
5#include <opencv2/highgui.hpp>
6
7int main() {
8 using namespace std::chrono_literals;
9
10 const cv::Size resolution(200, 200);
11
12 // Initializing input events with events that represent a logo
13 dv::EventStore events = dv::data::generate::dvLogoAsEvents(0, resolution);
14
15 // Filter positive polarity events only
16 dv::EventPolarityFilter filter(true);
17
18 // Pass events to the filter
19 filter.accept(events);
20
21 // Call generate events to apply the filter
22 const dv::EventStore filtered = filter.generateEvents();
23
24 // Use a visualizer instance to preview the events
25 dv::visualization::EventVisualizer visualizer(resolution);
26
27 // Generate preview images of data input and output
28 const cv::Mat input = visualizer.generateImage(events);
29 const cv::Mat output = visualizer.generateImage(filtered);
30
31 // Concatenate the images into a single image for preview
32 cv::Mat preview;
33 cv::hconcat(input, output, preview);
34
35 // Display the input and output images
36 cv::namedWindow("preview", cv::WINDOW_NORMAL);
37 cv::imshow("preview", preview);
38 cv::waitKey();
39
40 return 0;
41}
1import dv_processing as dv
2import cv2 as cv
3from datetime import timedelta
4
5resolution = (200, 200)
6
7# Initializing input events with events that represent a logo
8events = dv.data.generate.dvLogoAsEvents(0, resolution)
9
10# Filter positive polarity events only
11filter = dv.EventPolarityFilter(True)
12
13# Pass events to the filter
14filter.accept(events)
15
16# Call generate events to apply the filter
17filtered = filter.generateEvents()
18
19# Use a visualizer instance to preview the events
20visualizer = dv.visualization.EventVisualizer(resolution)
21
22# Generate preview images of data input and output
23input = visualizer.generateImage(events)
24output = visualizer.generateImage(filtered)
25
26# Concatenate the images into a single image for preview
27preview = cv.hconcat([input, output])
28
29# Display the input and output images
30cv.namedWindow("preview", cv.WINDOW_NORMAL)
31cv.imshow("preview", preview)
32cv.waitKey()
The sample code outputs such images:

Output of the sample use of polarity filter. Left is a preview of input events and right is a preview of filtered events.
Note
The generated DV logo image comes from event representation, white area means no events are there, dark grey area are negative events and pixels are blue on coordinates where positive polarity events are provided. The filtered image only contains the letters “DV” since the background circle is represented by negative polarity events.
Event region filter
dv::EventRegionFilter - filter events based on given region of interest.
Following sample code shows the usage of the dv::EventRegionFilter to filter out specific area of events:
1#include <dv-processing/core/filters.hpp>
2#include <dv-processing/data/generate.hpp>
3#include <dv-processing/visualization/event_visualizer.hpp>
4
5#include <opencv2/highgui.hpp>
6
7int main() {
8 using namespace std::chrono_literals;
9
10 const cv::Size resolution(200, 200);
11
12 // Initializing input events with events that represent a logo
13 dv::EventStore events = dv::data::generate::dvLogoAsEvents(0, resolution);
14
15 // Initialize region filter using hardcoded coordinates
16 dv::EventRegionFilter filter(cv::Rect(50, 50, 100, 100));
17
18 // Pass events to the filter
19 filter.accept(events);
20
21 // Call generate events to apply the filter
22 const dv::EventStore filtered = filter.generateEvents();
23
24 // Use a visualizer instance to preview the events
25 dv::visualization::EventVisualizer visualizer(resolution);
26
27 // Generate preview images of data input and output
28 const cv::Mat input = visualizer.generateImage(events);
29 const cv::Mat output = visualizer.generateImage(filtered);
30
31 // Concatenate the images into a single image for preview
32 cv::Mat preview;
33 cv::hconcat(input, output, preview);
34
35 // Display the input and output images
36 cv::namedWindow("preview", cv::WINDOW_NORMAL);
37 cv::imshow("preview", preview);
38 cv::waitKey();
39
40 return 0;
41}
1import dv_processing as dv
2import cv2 as cv
3from datetime import timedelta
4
5resolution = (200, 200)
6
7# Initializing input events with events that represent a logo
8events = dv.data.generate.dvLogoAsEvents(0, resolution)
9
10# Initialize region filter using hardcoded coordinates
11filter = dv.EventRegionFilter((50, 50, 100, 100))
12
13# Pass events to the filter
14filter.accept(events)
15
16# Call generate events to apply the filter
17filtered = filter.generateEvents()
18
19# Use a visualizer instance to preview the events
20visualizer = dv.visualization.EventVisualizer(resolution)
21
22# Generate preview images of data input and output
23input = visualizer.generateImage(events)
24output = visualizer.generateImage(filtered)
25
26# Concatenate the images into a single image for preview
27preview = cv.hconcat([input, output])
28
29# Display the input and output images
30cv.namedWindow("preview", cv.WINDOW_NORMAL)
31cv.imshow("preview", preview)
32cv.waitKey()
The sample code outputs such images:

Output of the sample use of region filter. Left is a preview of input events and right is a preview of filtered events.
Filter chain
Multiple filters can be combined into a single filter chain, which optimizes memory operations to increase the
performance of applying multiple filters. This is achieved by using the dv::EventFilterChain class.
Multiple filters can be added using dv::EventFilterChain::addFilter() method, it accepts filter wrapped in
std::shared_pointer, the shared pointer is used to be able to modify the parameters of filters after they are added to
the filter chain.
Following sample code shows the usage of the dv::EventFilterChain to apply multiple types of filters in a
single chain:
1#include <dv-processing/core/filters.hpp>
2#include <dv-processing/data/generate.hpp>
3#include <dv-processing/noise/background_activity_noise_filter.hpp>
4#include <dv-processing/visualization/event_visualizer.hpp>
5
6#include <opencv2/highgui.hpp>
7
8int main() {
9 using namespace std::chrono_literals;
10
11 const cv::Size resolution(200, 200);
12
13 // Initializing input events with events that represent a logo
14 dv::EventStore events = dv::data::generate::dvLogoAsEvents(0, resolution);
15
16 // Initialize event filter chain, it contains no filters
17 dv::EventFilterChain filter;
18
19 // Now let's add filters
20 // First, add a region filter with hardcoded coordinates
21 filter.addFilter(std::make_shared<dv::EventRegionFilter<>>(cv::Rect(50, 50, 100, 100)));
22
23 // Second, add a positive polarity filter
24 filter.addFilter(std::make_shared<dv::EventPolarityFilter<>>(true));
25
26 // Third, add a background activity noise filter
27 filter.addFilter(std::make_shared<dv::noise::BackgroundActivityNoiseFilter<>>(resolution));
28
29 // Pass events to the filter
30 filter.accept(events);
31
32 // Call generate events to apply the filter chain, it will apply all three filters
33 const dv::EventStore filtered = filter.generateEvents();
34
35 // Use a visualizer instance to preview the events
36 dv::visualization::EventVisualizer visualizer(resolution);
37
38 // Generate preview images of data input and output
39 const cv::Mat input = visualizer.generateImage(events);
40 const cv::Mat output = visualizer.generateImage(filtered);
41
42 // Concatenate the images into a single image for preview
43 cv::Mat preview;
44 cv::hconcat(input, output, preview);
45
46 // Display the input and output images
47 cv::namedWindow("preview", cv::WINDOW_NORMAL);
48 cv::imshow("preview", preview);
49 cv::waitKey();
50
51 return 0;
52}
1import dv_processing as dv
2import cv2 as cv
3from datetime import timedelta
4
5resolution = (200, 200)
6
7# Initializing input events with events that represent a logo
8events = dv.data.generate.dvLogoAsEvents(0, resolution)
9
10# Initialize event filter chain, it contains no filters
11filter = dv.EventFilterChain()
12
13# Now let's add filters
14# First, add a region filter with hardcoded coordinates
15filter.addFilter(dv.EventRegionFilter((50, 50, 100, 100)))
16
17# Second, add a positive polarity filter
18filter.addFilter(dv.EventPolarityFilter(True))
19
20# Third, add a background activity noise filter
21filter.addFilter(dv.noise.BackgroundActivityNoiseFilter(resolution))
22
23# Pass events to the filter
24filter.accept(events)
25
26# Call generate events to apply the filter
27filtered = filter.generateEvents()
28
29# Use a visualizer instance to preview the events
30visualizer = dv.visualization.EventVisualizer(resolution)
31
32# Generate preview images of data input and output
33input = visualizer.generateImage(events)
34output = visualizer.generateImage(filtered)
35
36# Concatenate the images into a single image for preview
37preview = cv.hconcat([input, output])
38
39# Display the input and output images
40cv.namedWindow("preview", cv.WINDOW_NORMAL)
41cv.imshow("preview", preview)
42cv.waitKey()
The sample code outputs such images:

Output of the sample use of multiple filters in a filter chain. Left is a preview of input events and right is a preview of filtered events.
Filtering performance
The provided event filters performance is measured using benchmarks, the benchmarks for filters can be found under
directory benchmarks/noise in the project repository. These are sample benchmarking results, performance of filters is
measured in throughput of mega-events per second. These measurements were capture on an AMD Ryzen 5 3600 6-Core
processor.
Filter |
Event count per iteration |
Throughput, MegaEvents / second |
|---|---|---|
FastDecayNoiseFilter |
1000 |
82.3 |
FastDecayNoiseFilter |
4096 |
82.9 |
FastDecayNoiseFilter |
32768 |
80.1 |
FastDecayNoiseFilter |
262144 |
67.5 |
FastDecayNoiseFilter |
1000000 |
67.2 |
BackgroundActivityNoiseFilter |
1000 |
141.5 |
BackgroundActivityNoiseFilter |
4096 |
139.5 |
BackgroundActivityNoiseFilter |
32768 |
105.4 |
BackgroundActivityNoiseFilter |
262144 |
134.6 |
BackgroundActivityNoiseFilter |
1000000 |
135.0 |
RefractoryPeriodFilter |
1000 |
268.7 |
RefractoryPeriodFilter |
4096 |
278.9 |
RefractoryPeriodFilter |
32768 |
254.9 |
RefractoryPeriodFilter |
262144 |
255.1 |
RefractoryPeriodFilter |
1000000 |
167.5 |
PolarityFilter |
1000 |
503.7 |
PolarityFilter |
4096 |
345.0 |
PolarityFilter |
32768 |
165.4 |
PolarityFilter |
262144 |
157.7 |
PolarityFilter |
1000000 |
156.6 |
RegionFilter |
1000 |
446.9 |
RegionFilter |
4096 |
371.7 |
RegionFilter |
32768 |
166.8 |
RegionFilter |
262144 |
153.6 |
RegionFilter |
1000000 |
151.0 |
MaskFilter |
1000 |
421.5 |
MaskFilter |
4096 |
264.8 |
MaskFilter |
32768 |
123.6 |
MaskFilter |
262144 |
118.0 |
MaskFilter |
1000000 |
117.1 |
ThreeFiltersNoChain |
1000 |
89.3 |
ThreeFiltersNoChain |
4096 |
88.0 |
ThreeFiltersNoChain |
32768 |
76.2 |
ThreeFiltersNoChain |
262144 |
75.0 |
ThreeFiltersNoChain |
1000000 |
72.6 |
ThreeFiltersWithChain |
1000 |
170.4 |
ThreeFiltersWithChain |
4096 |
99.1 |
ThreeFiltersWithChain |
32768 |
69.4 |
ThreeFiltersWithChain |
262144 |
70.3 |
ThreeFiltersWithChain |
1000000 |
70.1 |